王者荣耀刘禅(《王者荣耀》刘禅皮肤天才门将和绅士熊猫,哪款手感比较好?入手有何建议)
众所周知,刘禅在王者荣耀中的定位为“坦克型”辅助,其主要的贡献在于推进、控制、输出,通过被动技能的特殊输出机制,可对敌方防御塔进行...
2023-11-27
一般来说,无人机有飞行器机架、飞行控制系统、推进系统、遥控器、遥控信号接收器和云台相机等6大构成部分。
1. 飞行器机架
飞行器机架的大小,取决于桨翼的尺寸及电机(马达/马达)的体积:桨翼愈长,马达愈大,机架大小便会随之而增加。机架一般采用轻物料制造为主,以减轻无人机的负载量。
2. 飞行控制系统
飞行控制系统,简称飞控,一般会内置控制器、陀螺仪、加速度计和气压计等传感器。无人机便是依靠这些传感器来稳定机体,再配合GPS及气压计数据,便可把无人机锁定在指定的位置及高度。
3. 推进系统
无人机的推动系统主要由桨翼和马达所组成。当桨翼旋转时,便可以产生反作用力来带动机体飞行。系统内设有电调控制器,用于调节马达的转速。
4. 遥控器
让航拍玩家透过远程控制技术来操控无人机的飞行动作。
5. 遥控信号接收器
主要作用是让飞行器接收由遥控器发出的遥控指令信号。4轴无人机起码要有4条频道来传送信号,以便分别控制前后左右4组旋轴和马达。
6. 云台相机
云台是整个航拍系统中最重要的部件,航拍视频的画面是否稳定,便全要看云台的表现如何。云台一般会内置有两组电机,分别负责云台的上下摆动和左右摇动,让架设在云台上的摄像机可维持旋转轴不变,令航拍画面不会因飞行器震动而晃动起来。
3.无人机飞行原理是什么?
以直升机为例,根据牛顿第三定律,旋翼在旋转的同时,也会同时向电机施加一个反作用力(反扭矩),促使电机向反方向旋转。现在的直升机都会带一个小尾巴,在水平方向上施加一个力,去抵消这种反作用力,保持直升机机身的稳定。
同理,四旋翼飞行器的螺旋桨也会产生这样的力。在四旋翼飞机的四个螺旋桨中,相邻的两个螺旋桨旋转方向是相反的,以避免飞机疯狂自旋。
郑重声明:本文版权归原作者所有,转载文章仅为传播更多信息之目的,如有侵权行为,请第一时间联系我们修改或删除,多谢。
相关文章

众所周知,刘禅在王者荣耀中的定位为“坦克型”辅助,其主要的贡献在于推进、控制、输出,通过被动技能的特殊输出机制,可对敌方防御塔进行...
2023-11-27

解说娃娃微博转发司马老贼表情包,为什么解说都喜欢调侃司马老贼?在7月20号上午LPL官方牌面解说娃娃转发了一则关于司马老贼的表情包微博,...
2023-11-27

1、在我们的手机打开app,登录账号进去,如下图所示。2、进去主界面之后,点击个人头像,如下图所示。3、点击进去之后,可以看到账号的情况...
2023-11-27

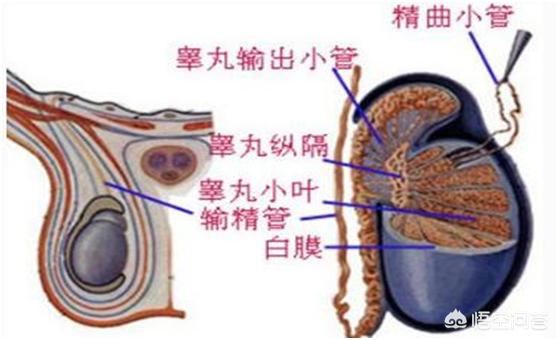
谢邀!保持母乳充足要从以下三个方面即可:1 产后母亲应和婴儿早接触、让婴儿早吸吮是保持泌乳的关健。2 母亲要保持均衡的营养,如可食用...
2023-11-27

1、第一个就是我们的射手黄忠了,我们的五虎将之一的射手黄忠。2、然后在五虎将中,我们是可以有一个辅助的类型的,那就是我们的张飞了!3...
2023-11-27
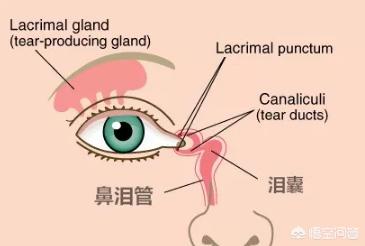
婴幼儿流泪或伴随眼屎多,跟上火可没啥关系,千万不要不够重视。六个月以内的小宝宝,在没有任何征兆下出现眼泪、分泌物增多等表现,最大的...
2023-11-26

论青铜器的成就,对比世界范围,三星堆和殷墟的制品都是属于天花板的级别,看看两者皆拥有不少禁止出国展览的“禁级”国宝就可知其重要性。...
2023-11-26





热门文章
德国民众“感知中国”
触族用触屏手套创业从迷茫走向坚定
巴黎美爵九月启动定制服务国内高端客户可体验欧洲皇室尊荣
RAX助力2013厦门环岛徒步“轻启程,一起走”
索菲亚引进法国第一橱柜品牌:SCHMIDT司米打造整体橱柜市场新格